
We shared the news with our Kickstarter backers first: we just added a nice little web interface to NoCAN.
This means that you don't need the command line anymore if you want to:
- Upload Arduino firmware to a CANZERO node.
- Check the list of nodes and channels in your NoCAN network.
- Monitor the voltage and current sensed by your PiMaster on our Raspberry Pi.
To try it out, first, you'll need to make sure that you have downloaded and installed the latest version of nocanc and nocand. See our tutorial for details.
Next, simply run:
nocanc webui
And point your browser to http://localhost:8080/ and get access to the new web interface demonstrated on the video below.
By default, nocan webui allows connections from localhost only, on port 8080. This means that if nocanc webui runs a different machine than your browser, you won't be able to connect. To enable connections from anywhere, you can type the following command:
nocanc webui --web-server=":8080"
So for example, if nocanc is running on a machine with IP address "192.168.1.100", you can now point your browser to http://192.168.1.100:8080. You can also use the same command to change the default port 8080 to something else.
To upload an Arduino sketch to a CANZERO node, first make sure that your Arduino IDE is correctly setup, with the NoCAN board descriptor.
Next select Sketch > Export compiled Binary in the Arduino IDE and then Sketch > Show sketch folder. There you will find a file with a name ending with omzlo_canzero.hex. In the web interface, select the target node and click on "Upload firmware" using that file. You can even "drag and drop" the file to the upload form in the web interface.
That's all!
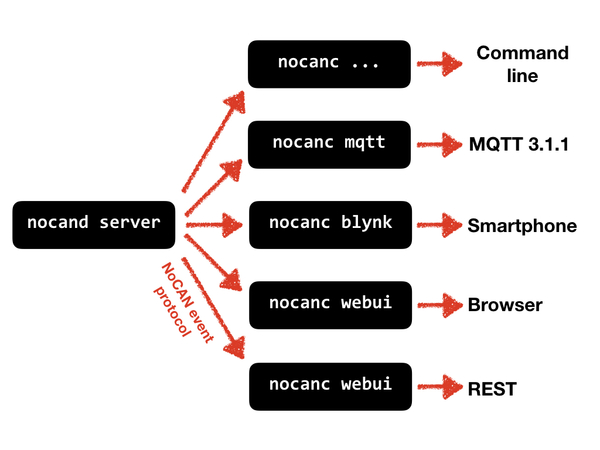
Running nocanc webui also exposes a JSON RESTful API that will be documented soon. This gives users of the NoCAN platform an amazing range of interfacing possibilities, as summarized in the figure below.
We are planning to add more features to the Web UI in the near future, including password protected access.
Tell us what you think and head to our forums if you need any help.
Comments
No comment yet
Leave a comment