
NoCAN offers an easy way for makers to build an Arduino-compatible "wired" IoT network for their home and garden, using just a simple cable that provides CAN bus networking and DC power.
Today, when building IoT network, many of us rely on WiFi or Bluetooth. Boards like the ESP8266 have enabled countless amazing networked projects. But such wireless solutions are not adequate for all applications: the signal does not always reach where it's needed, and you may find yourself running into power issues, swapping batteries all the time. You may realize that a "wired" solution is a better approach. Our motivation is to provide maker-friendly open-source "wired" alternative to the ubiquitous wireless IoT solutions.
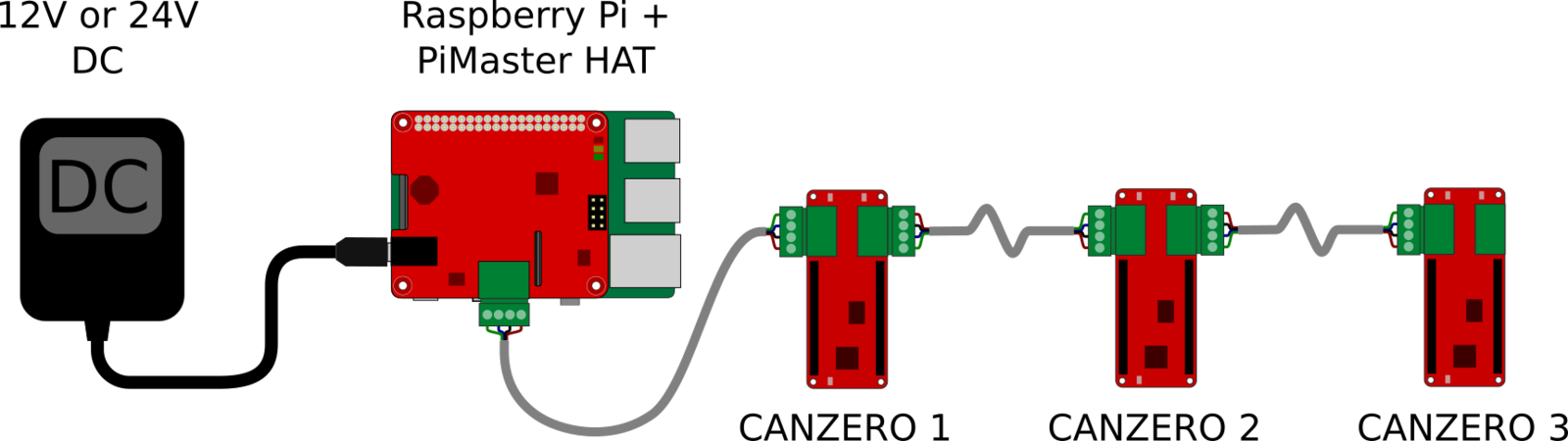
The architecture of a NoCAN network is simple. You have a set of nodes connected together with a single four-wire cable, forming a daisy chain. One of the nodes is the network manager, built with a Raspberry Pi connected to a special board: the Omzlo PiMaster HAT. The rest of the nodes are Arduino-compatible boards based on the Atmel SAMD21G18: a solid ARM Cortex M0+ MCU that powers the latest generation of Arduinos. These nodes, called Omzlo CANZERO, are physically compatible with the Arduino MKR familly of boards with 2 rows of 14-pin headers that you can connect sensors and actuators to build your next project. The Raspberry Pi acts as a gateway between the NoCAN network and the outside world. In fact, the provided software can be connected to the blynk platform so you can even control your nodes from the other side of the planet with your smartphone.
You can write your code in the Arduino IDE and upload the resulting firmware to any node in your network.
The networking protocol is based on CAN bus. It runs at a modest 125Kpbs but allows to build networks that can span over 300 meters (1000 feet) with very reliable true multi-master communications. Contrary to typical CAN bus networks, the NoCAN platform provides dynamic node address allocation and publish/subscribe communications.
Yep. We took CAN bus networking where it has never been before!
As illustrated in our blog, this project went through many iterations, with different names and different hardware. It was built in a garage over many sleepless nights. We started with a failed crowdfunding campaign and took our designs to Maker Faire exhibitions in Athens and Rome. We got great feedback and ideas that helped us mature this platform over the past year. We now think that it's pretty cool and we would like to share it with the community.
To learn more about this project, the PiMaster HAT, and the CANZERO nodes, read our dedicated project page and our mega-tutorial.
We are planning to start a beta-tester program: we will be giving away free NoCAN hardware kits to creative makers in exchange for some help rooting out final bugs and issues. Stay tuned!
And don't forget to follow us on twitter or on our facebook page.
Comments
Congratulations ! I just got the info from Sabine P. with whom I worked. It might be quite useful for some of our low-tech prototypes...and not only ! BR Carole
Carole Favart, about 8 years agoThe combination of PiMaster (Raspberry Pi 3 Model B HAT) and several CanZeros really made my home automation system architecture easy to plan and manage. I'm really excited and happy about those products :-) They are easy to get rock and roll and so far everything works fine. Actually I'm planning to get at least three of them (master+zeros) to do the job: one combination handles air condition system, one collects measurement data from various sources into time series database (InfluxDB) and the third one will adjust the windows shadowing system (via servos) automatically. Maybe only one CAN-bus could do the job, but I prefer to use separate systems...
Yrjö Seppä, almost 6 years agoLeave a comment